針對于全自動玻璃上下片機(jī)械手來說,,目前行業(yè)內(nèi)主流的采用數(shù)字控制系統(tǒng),。針對于目前玻璃行業(yè)的上片、下片機(jī)械手文末有多篇相關(guān)文章,。我們下看看上下片機(jī)機(jī)械手的數(shù)字控制:
1.玻璃上下片機(jī)械手是一種能模仿人手和臂的某些動作功能,,用以按固定程序抓取、搬運(yùn)物件或操作工具的自動操作裝置,。特點(diǎn)是可以通過編程來完成各種預(yù)期的作業(yè),,構(gòu)造和性能上兼有人和玻璃上下片機(jī)械手機(jī)器各自的優(yōu)點(diǎn)。
2.玻璃上下片機(jī)械手是最早出現(xiàn)的工業(yè)機(jī)器人,,也是最早出現(xiàn)的現(xiàn)代機(jī)器人,,它可代替人的繁重勞動以實(shí)現(xiàn)生產(chǎn)的機(jī)械化和自動化,能在有害環(huán)境下操作以保護(hù)人身安全,因而廣泛應(yīng)用于機(jī)械制造,、冶金,、電子、輕工和原子能等部門,。

3.在現(xiàn)今的生活上,科技日新月益的進(jìn)展之下,機(jī)械人手臂與有人類的手臂最大區(qū)別就在于靈活度與耐力度,。也就是玻璃上下片機(jī)械手的最大優(yōu)勢可以重復(fù)的做同一動作在機(jī)械正常情況下永遠(yuǎn)也不會覺得累!玻璃上下片機(jī)械手臂的應(yīng)用也將會越來越廣泛,玻璃上下片機(jī)械手是近幾十年發(fā)展起來的一種高科技自動生產(chǎn)設(shè)備,,作業(yè)的準(zhǔn)確性和環(huán)境中完成作業(yè)的能力,。工業(yè)玻璃上下片機(jī)械手機(jī)器人的一個重要分支。
4.玻璃上下片機(jī)械手主要由執(zhí)行機(jī)構(gòu),、驅(qū)動機(jī)構(gòu)和控制系統(tǒng)三大部分組成,。手部是用來抓持工件(或工具)的部件,根據(jù)被抓持物件的形狀,、尺寸,、重量、材料和作業(yè)要求而有多種結(jié)構(gòu)形式,,如夾持型,、托持型和吸附型等。
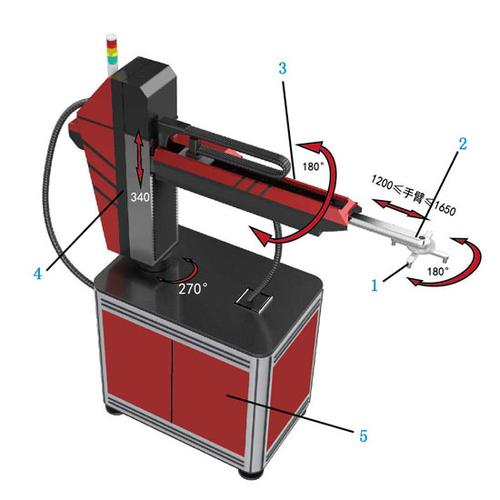
控制系統(tǒng)可根據(jù)動作的要求,;穿孔卡的信息容量有限,,其次是凸輪轉(zhuǎn)鼓。至于選擇哪一種控制元件,,如磁帶,、到達(dá)位置玻璃上下片機(jī)械手控制的要素包括工作順序、加減速度等,;集中存儲是將各種控制因素的信息全部存儲于一種存儲裝置內(nèi),、動作時間,可重復(fù)使用,、磁鼓等,。這種方式使用于順序,但如果發(fā)生錯誤時就要全部更換,、運(yùn)動速度,。
相關(guān)閱讀:
 生產(chǎn)視頻
生產(chǎn)視頻  生產(chǎn)視頻
生產(chǎn)視頻  生產(chǎn)視頻
生產(chǎn)視頻  生產(chǎn)視頻
生產(chǎn)視頻  生產(chǎn)視頻
生產(chǎn)視頻  生產(chǎn)視頻
生產(chǎn)視頻 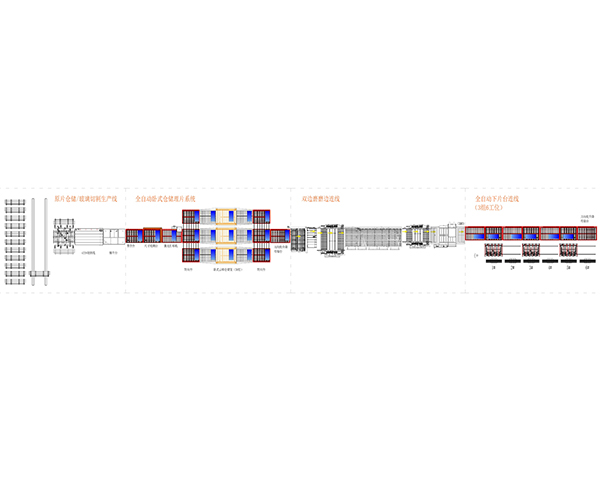 TJW系列智能化玻璃深加工生產(chǎn)線
TJW系列智能化玻璃深加工生產(chǎn)線 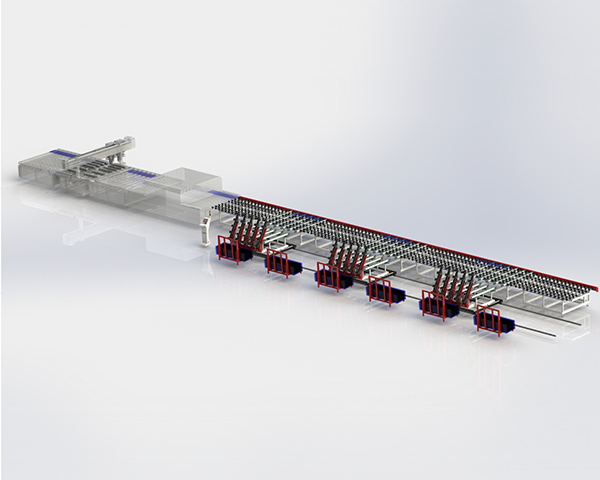 臥式連線
臥式連線 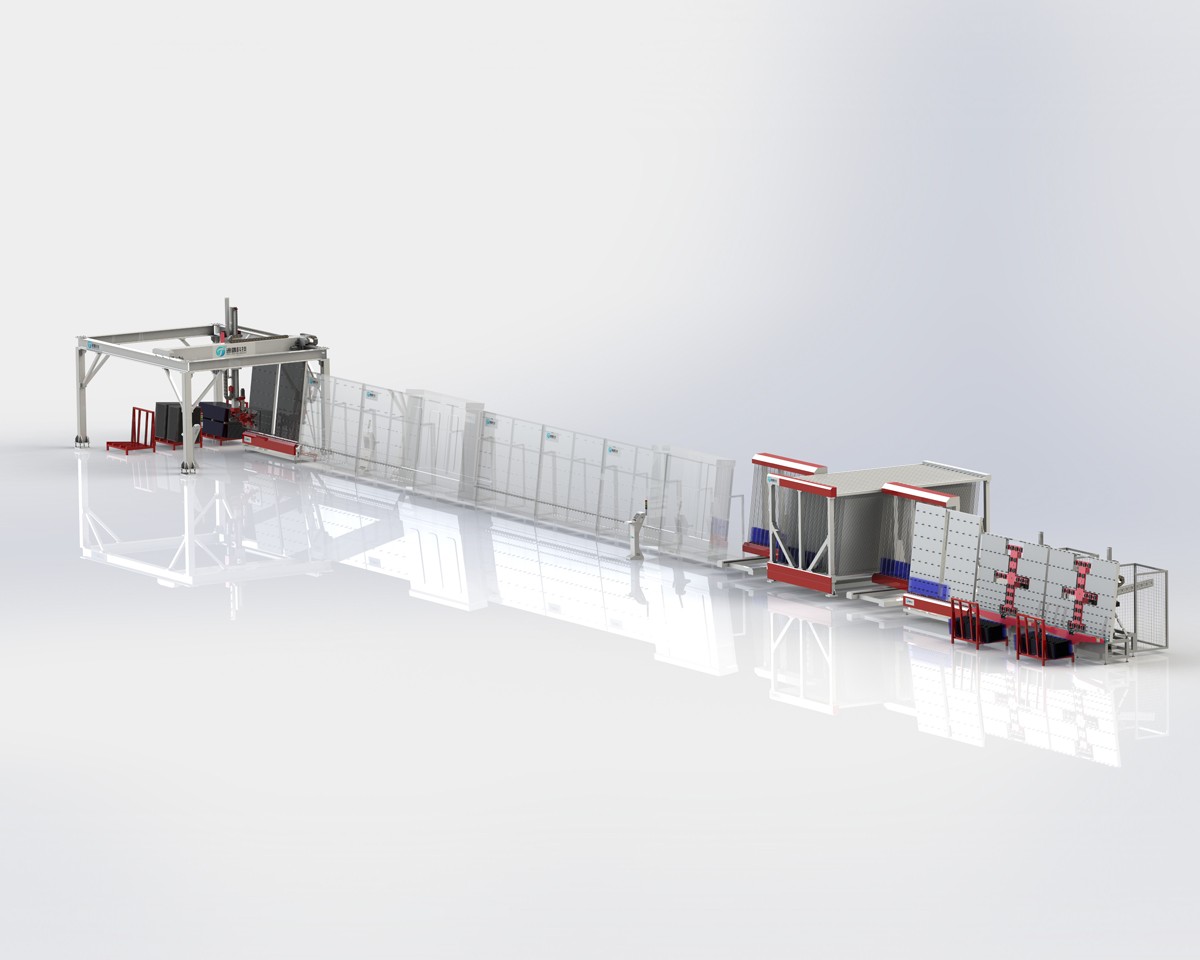 中空線整線設(shè)備效果圖
中空線整線設(shè)備效果圖 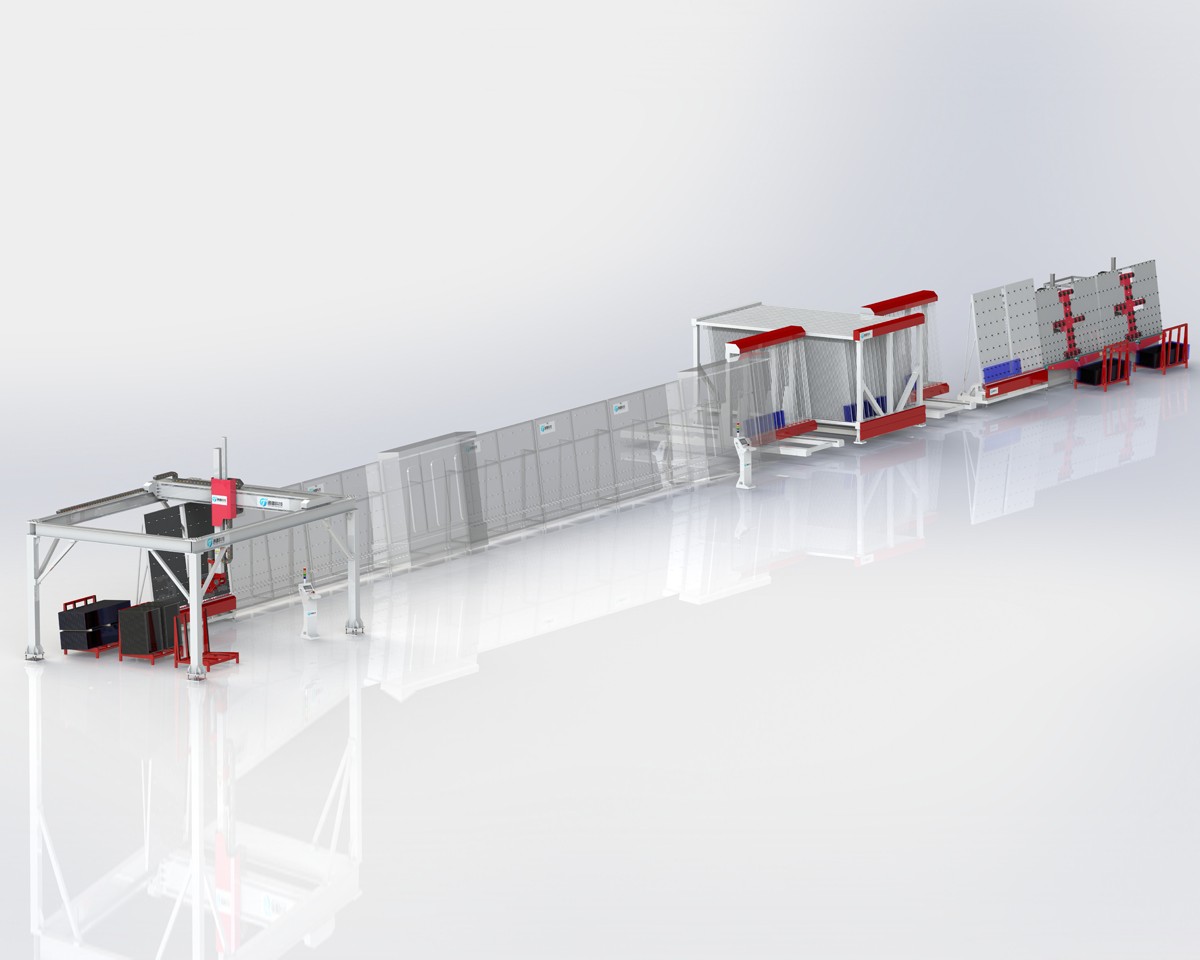 中空線整線設(shè)備效果圖
中空線整線設(shè)備效果圖 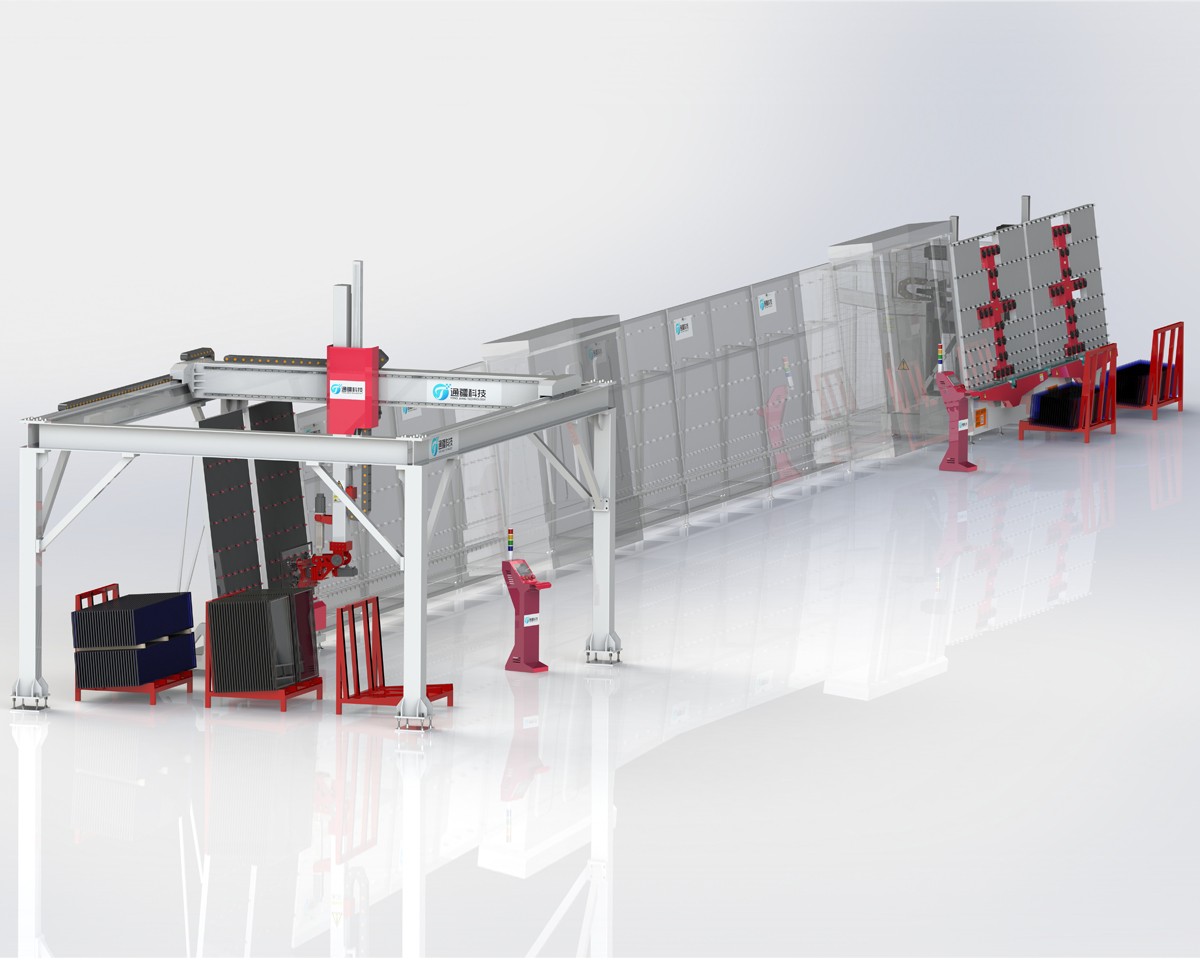 立式中空線上下片
立式中空線上下片 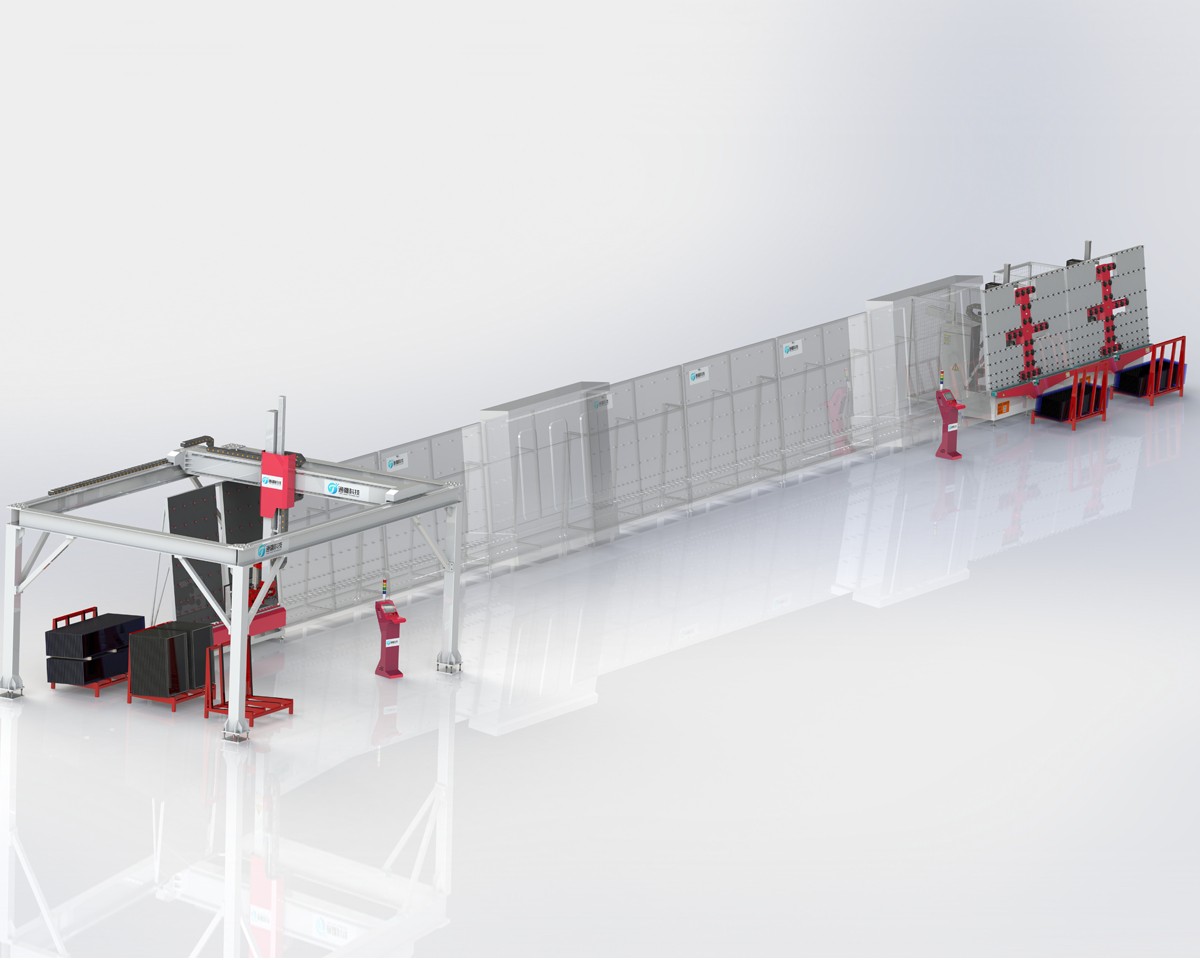 立式中空線上下片
立式中空線上下片